RGB colour correction
So I’ve been playing with different colour correction techniques for my LED’s. So here’s a simple one. Square it. Well […]
So I’ve been playing with different colour correction techniques for my LED’s. So here’s a simple one. Square it. Well […]
So today I’ve been working with some RGB LED’s once again and I’ve notice (or rather re noticed) how non-linear […]
Today I’ve been tidying up some paperwork and I came across some old cut plans for making racks. The thing that I was working […]
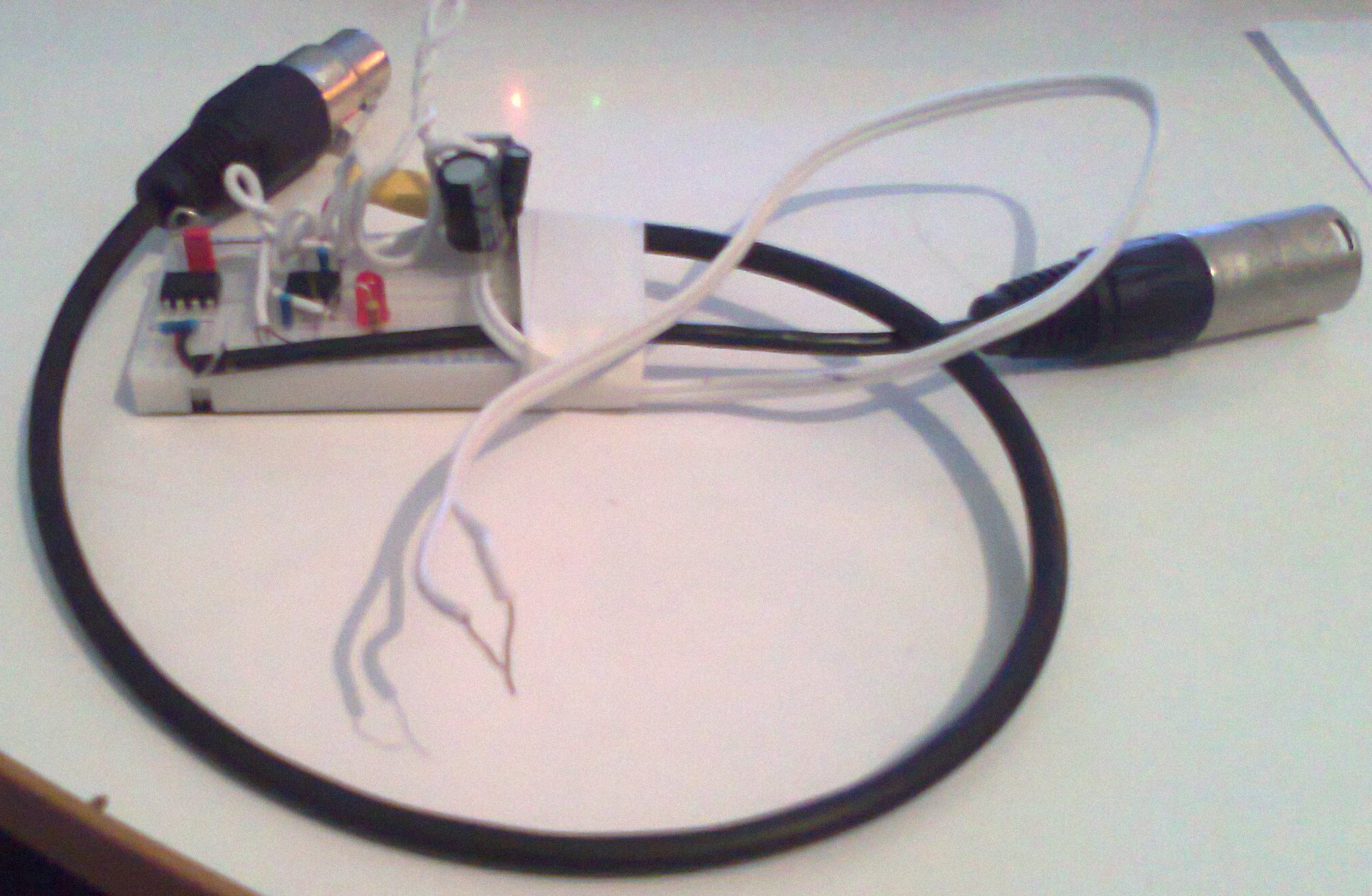
Today I made a prototype of my design for an opto-isolating booster for the DMX protocol. And well it worked […]
I tried my Lego prototype today with a moving head. The results weren’t as good as I was hoping. After a bit of tweaking […]

The other night while working on an event I though about this and well – “how hard can it be?” […]

So today i’ve been working on a general purpose flightcase that’s suitable for many things but some of the uses […]
So recently i was testing some old Clay Paky Pin Scans with a friend and i reached for a simple 6 channel […]