The motion system consisted of the moving parts for this project.
And the first part’s arrived today, The linear rails.
Linear rails
The PSU is coming from an old ATX PSU I’ve hacked.
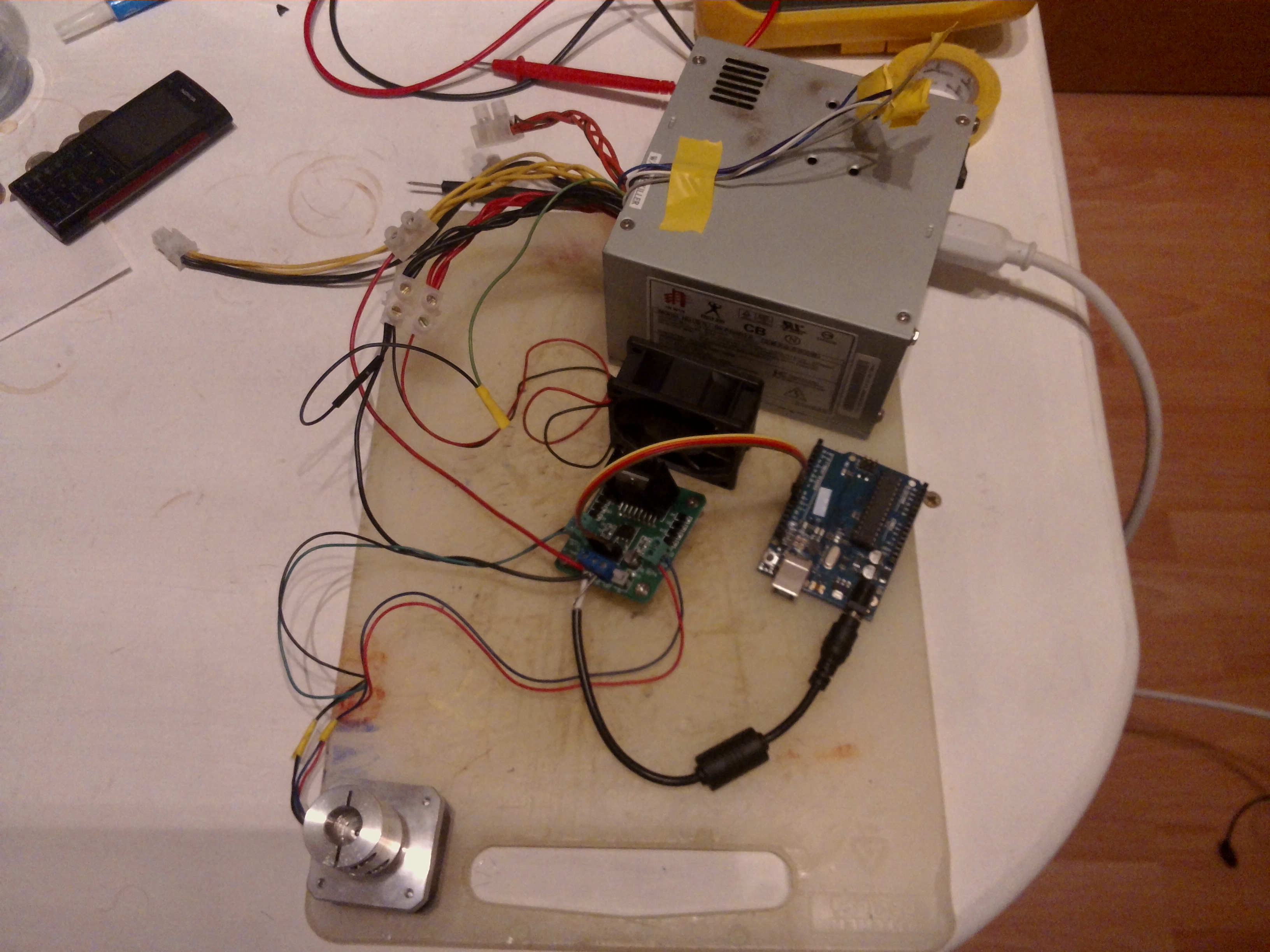
12v stepper motor arrangement
Belts are in the post but i’m using GT2 belt and pulleys rather than T2.5 this is supposed to have less backlash and therefore be more suitable. The GT2 belt i’m using has a pitch of 2mm and the pulleys I’m using have 20 teeth. So 1 revolution is 40mm of linear motion in 200 steps. With a maximum of say 150rpm as discussed http://crazy-logic.co.uk/archives/390, we can achieve a linear speed of 40*150 mm/min or 6m/min or 10cm/second, with an accuracy of 40/200 mm or 1/5 mm without micro-stepping.
I’ve now got some stepper motor driver circuits which allow micro stepping and current limiting. with these I’ve managed to achieve around 230rpm which is a lot more than previously. Assuming this number is accurate, 40*230 ~9.2m/min or 15cm/second. with an accuracy of 40/(16*200) or 0.0125mm. I’ld say that’s worth the extra 5£ a motor. (my code is here)